変分法は Sasaki (1958 ) により、物理法則による拘束を課す解析手法として提案され、Talagrand and Courtier (1987 ) に制御理論に基づく理論的な裏付けがされている。 Lorenc (1986 ) は、数値天気予報における様々な解析手法を比較し、変分法がベイズ推定から導かれることを指摘している。 ここでは、Tsuyuki and Miyoshi (2007 ) に基づいて、変分法データ同化について述べる。
3次元変分法
3次元変分法同化(3DVar: three-dimensional variational assimilation)は、第一推定値\(\mathbf{x}^\mathrm{f}\) 及び観測\(\mathbf{y}^\mathrm{o}\) が与えらたときに、後験pdfを最大化するものを解析値\(\mathbf{x}^\mathrm{a}\) とする。
\[
\begin{aligned}
\mathbf{x}^\mathrm{a} &= \underset{\mathbf{x}}{\text{arg max}}[p(\mathbf{x}|\mathbf{x}^\mathrm{f},\,\mathbf{y}^\mathrm{o})]\\
&= \underset{\mathbf{x}}{\text{arg max}}[p(\mathbf{x}^\mathrm{f}|\mathbf{x})p(\mathbf{y}^\mathrm{o}|\mathbf{x})p(\mathbf{x})]
\end{aligned}
\tag{3.1}\] \(J(\mathbf{x})\) を定義すると、 \[
J(\mathbf{x}) = \frac{1}{2}(\mathbf{x}-\mathbf{x}^\mathrm{f})^\mathrm{T}\mathbf{B}^{-1}(\mathbf{x}-\mathbf{x}^\mathrm{f}) + \frac{1}{2}(h(\mathbf{x})-\mathbf{y}^\mathrm{o})^\mathrm{T}\mathbf{R}^{-1}(h(\mathbf{x})-\mathbf{y}^\mathrm{o}) + J_\mathrm{c}(\mathbf{x})
\tag{3.2}\] \(\mathbf{B},\,\mathbf{R}\) はそれぞれ背景及び観測誤差共分散行列、\(h(\mathbf{x})\) は状態変数を観測変数に変換する観測演算子である。 式(Equation 3.2 )の右辺第一、二項はそれぞれ第一推定値、観測値からのずれを表す。 式(Equation 3.2 )の右辺第三項は、式(Equation 3.1 )の右辺第三項に対応し、制約項と呼ばれている。
3DVarでは、数値最適化により\(J(\mathbf{x})\) の最小値として解析値\(\mathbf{x}^\mathrm{a}\) を求める。 \(h(\mathbf{x})\) の接線型演算子を\(\mathbf{H}\) で表すと、制約項を無視した解析値は \[
\mathbf{x}^\mathrm{a} = \mathbf{x}^\mathrm{f} + (\mathbf{B}^{-1} + \mathbf{H}^\mathrm{T}\mathbf{R}^{-1}\mathbf{H})^\mathrm{-1}\mathbf{H}^\mathrm{T}\mathbf{R}^{-1}[\mathbf{y}^\mathrm{o} - h(\mathbf{x}^\mathrm{f})]
\tag{3.3}\]
4次元変分法
4次元変分法同化(4DVar: four-dimensional variational assimilation)では、同化窓と呼ばれる期間に対するMAP推定を行う。 時刻レベル\(i-1\) から\(i\) までの数値モデルによる予報を \[
\mathbf{x}_i = M_{i-1,i}(\mathbf{x}_{i-1})\;i=1,\dots,n
\tag{3.4}\] \[
J(\mathbf{x_0}) = \frac{1}{2}(\mathbf{x}_0-\mathbf{x}_0^\mathrm{f})^\mathrm{T}\mathbf{B}^{-1}(\mathbf{x}_0-\mathbf{x}_0^\mathrm{f}) + \frac{1}{2}\sum_{i=0}^n(h_i(\mathbf{x}_i)-\mathbf{y}_i^\mathrm{o})^\mathrm{T}\mathbf{R}_i^{-1}(h_i(\mathbf{x}_i)-\mathbf{y}_i^\mathrm{o}) + J_\mathrm{c}(\mathbf{x}_0,\dots,\mathbf{x}_n)
\tag{3.5}\] \(M\) の接線型演算子\(\mathbf{M}\) で時間発展し、解析値は式(Equation 3.3 )の\(\mathbf{B}\) を\(\mathbf{M}^\mathrm{T}\mathbf{BM}\) で置き換えたものとなる。
4DVarでは、解析値を効率的に求めるために、\(J(\mathbf{x_0})\) の勾配を用いた最適化を用いる(Talagrand and Courtier 1987 ) 。 初期値\(\mathbf{x}_0\) に対する勾配 \[
\mathbf{p}_0 = \nabla_{\mathbf{x}_0}J(\mathbf{x}_0)
\tag{3.6}\] \(\mathbf{p}_{n+1} = \mathbf{0}\) を初期値として、時間逆向きに \[
\mathbf{p}_i = \mathbf{M}_i^\mathrm{T}\mathbf{p}_{i+1} + \frac{\partial J}{\partial\mathbf{x}_i}\;i=n,\dots,0
\tag{3.7}\] \(\mathbf{M}_i^\mathrm{T}\) で一つ前の時間レベルまで、随伴変数を積分すること表している。 以下に随伴モデルの作り方を示す。
随伴法の理論
随伴法の理論(Talagrand and Courtier 1987 ; Talagrand 1991 ) について述べる。
ヒルベルト空間\(\mathscr{F}\) での内積を\((,)\) で表す。 \(\mathbf{v}\rightarrow\mathscr{J}(\mathbf{v})\) は、\(\mathscr{F}\) 上の微分可能な函数とする。 \(\mathscr{F}\) 上の任意の点で\(\mathscr{F}\) の微分\(\delta\mathscr{F}\) は、内積により\(\mathbf{v}\) の微分\(\delta\mathbf{v}\) で表すことができる。
\[
\delta\mathscr{J} = (\nabla_\mathbf{v}\mathscr{F},\delta\mathbf{v})
\tag{3.8}\]
ここで\(\nabla_\mathbf{v}\mathscr{J}\) は、\(\mathbf{v}\) についての\(\mathscr{F}\) の勾配で唯一に定まる。 \(\mathscr{F}\) が有限次元で正規直交系\(v_i\) で表されるとき、\(\nabla_\mathbf{v}\mathscr{F}\) の要素は\(\partial\mathscr{J}/\partial v_i\) となるが、勾配の概念はより一般的なものを表している。
\(\mathscr{F}\) とは別のヒルベルト空間\(\mathscr{E}\) での内積を\(\langle,\rangle\) で表し、\(\mathbf{L}\) を\(\mathscr{E}\) から\(\mathscr{F}\) への連続な線型演算子とする。 任意の\(\mathbf{u}\in\mathscr{E}\) と任意の\(\mathbf{v}\in\mathscr{F}\) に対して内積が等値である、\(\mathscr{F}\) から\(\mathscr{E}\) への連続な線型演算子の\(\mathbf{L}^*\) が唯一存在する。
\[
(\mathbf{v},\mathbf{Lu}) = \langle\mathbf{L}^*\mathbf{v},\mathbf{u}\rangle
\tag{3.9}\]
\(\mathbf{L}^*\) は\(\mathbf{L}\) の随伴演算子(adjoint operator)と呼ばれる。 \(\mathscr{E}\) と\(\mathscr{F}\) が有限次元で正規直交系座標で表されるとき、\(\mathbf{L}^*\) は\(\mathbf{L}\) を表す行列の転置(要素が複素数なら共軛転置)である。
必ずしも線型とは限らない、\(\mathscr{E}\) から\(\mathscr{F}\) への可能な函数\(\mathbf{u}\rightarrow\mathbf{v} = \mathbf{G}(\mathbf{u})\) を考えると、\(\mathscr{J}(\mathbf{v}) = \mathscr{J}[\mathbf{G}(\mathbf{u})]\) は\(\mathbf{u}\) の合成函数となる。 \(\mathbf{u}\) の微分はEquation 3.8 、\(\delta\mathbf{v}\) の微分は
\[
\delta\mathbf{v} = \mathbf{G}'\delta\mathbf{u}
\tag{3.10}\]
で与えられる。 ここで\(\mathbf{G}'\) は\(\mathbf{G}\) を微分した\(\mathscr{E}\) から\(\mathscr{F}\) への線型演算子である。 Equation 3.10 をEquation 3.8 に代入し、\(\mathbf{G}\) の随伴\(\mathbf{G}^{'*}\) を導入すると
\[
\delta\mathscr{J} = (\nabla_\mathbf{v}\mathscr{J},\mathbf{G}'\delta\mathbf{u})
= \langle\mathbf{G}^{'*}\nabla_\mathbf{v}\mathscr{J}, \delta\mathbf{u}\rangle
\]
が得られる。 勾配の定義により、\(\mathscr{J}\) の\(\mathbf{u}\) についての勾配\(\nabla_\mathbf{u}\mathscr{J}\) は
\[
\nabla_\mathbf{u} = \mathbf{G}^{'*}\nabla_\mathbf{v}\mathscr{J}
\tag{3.11}\]
Equation 3.11 は制御理論における随伴方程式の基本であり、数値的に\(\nabla_\mathbf{u}\mathscr{J}\) を計算する非常に効率的な方法を与える。 ここでは、\(\mathbf{u}\rightarrow\mathbf{v} = \mathbf{G}(\mathbf{u})\) を想定しているので、\(\mathbf{v}\) は\(\mathbf{u}\) の明示的ではあるが複雑な関数になっているため、計算可能な\(\nabla_\mathbf{u}\mathscr{J}\) の解析的な式を得ることは困難である。 \(\nabla_\mathbf{u}\mathscr{J}\) の数値的に見積もるために、\(\mathbf{u}\) の各要素に摂動を加えて、それぞれの摂動に対して\(\mathbf{v} = \mathbf{G}(\mathbf{u})\) を計算するのは、大次元では現実的ではない。 Equation 3.11 が示しているのは、与えられた\(\mathbf{w}\) に対して\(\mathbf{G}^{'*}\mathbf{w}\) を計算するプログラムがあれば、\(\nabla_\mathbf{u}\) は\(\nabla_\mathbf{v}\) から容易に計算できるということである。 \(\nabla_\mathbf{v}\) 自体は\(\mathscr{J}\) が\(\mathbf{v}\) の簡単な函数であれば容易に求めることができる。 て\(\mathbf{G}^{'*}\mathbf{w}\) の計算は、\(\mathbf{G}(\mathbf{u})\) を計算と同程度の複雑さであり、\(\mathbf{v} = \mathbf{G}(\mathbf{u})\) を計算して\(\nabla_\mathbf{v}\mathscr{J}\) を求め、Equation 3.11 により最終的に\(\nabla_\mathbf{u}\) を求める計算は\(\mathbf{G}(\mathbf{u})\) の2〜3倍程度であり、直接明示的に\(\mathbf{u}\) の各要素に摂動を与えるよりも大幅に計算量を削減できる。
随伴モデル
次の形の常微分方程式を考える。
\[
\frac{\mathrm{d}\mathbf{w}}{\mathrm{d}t} = N(\mathbf{w}) + \mathbf{Lw} + \mathbf{f}
\tag{3.12}\]
状態変数を\(\mathbf{w}\) 、非線型項を\(N(\mathbf{w})\) 、線型項を\(\mathbf{Lw}\) 、強制を\(\mathbf{f}\) で表している。 状態変数に摂動を与えた\(\mathbf{w}+\delta\mathbf{w}\) を(Equation 3.12 )に代入し、摂動の時間発展\(\mathrm{d}\delta\mathbf{w}/\mathrm{d}t=\mathrm{d}(\mathbf{w}+\delta\mathbf{w})/\mathrm{d}t-\mathrm{d}\mathbf{w}/\mathrm{d}t\) を求めると接線型モデル(TLM: tangent linear model)が得られる。
\[
\frac{\mathrm{d}\delta\mathbf{w}}{\mathrm{d}t} = \left(\left.\frac{\partial N}{\partial\mathbf{w}}\right|_\mathbf{w} + \mathbf{L}\right)\delta\mathbf{w}
\tag{3.13}\] \(\delta\mathbf{w}\) が微小であると仮定し、その二次以上の項を無視した。 強制項\(\mathbf{f}\) はTLMにはない。
\(\partial N/\partial\mathbf{w}|_\mathbf{w} + \mathbf{L}\) を改めて\(\mathbf{L}\) と置き、入力\(\delta\mathbf{w}\) 及び出力\(\dot{\delta\mathbf{w}}=\mathrm{d}\delta\mathbf{w}/\mathrm{d}t\) を縦に並べたベクトルを用いて行列形式で表す。
\[
\begin{bmatrix}
\delta\mathbf{w}\\
\dot{\delta\mathbf{w}}
\end{bmatrix} =
\begin{bmatrix}
\mathbf{I} & \mathbf{0}\\
\mathbf{L} & \mathbf{0}
\end{bmatrix} \begin{bmatrix}
\delta\mathbf{w}\\
\dot{\delta\mathbf{w}}
\end{bmatrix}
\tag{3.14}\] \[
\begin{aligned}
\delta\mathbf{w} &= \delta\mathbf{w}\\
\dot{\delta\mathbf{w}} &= \mathbf{L}\delta\mathbf{w}
\end{aligned}
\] である。 随伴変数を\(\mathbf{w}^\mathrm{a}\) とすると、(Equation 3.14 )の随伴モデル(ADM, adjoint model)は \[
\begin{bmatrix}
\mathbf{w}^\mathrm{a}\\
\dot{\mathbf{w}}^\mathrm{a}
\end{bmatrix} =
\begin{bmatrix}
\mathbf{I} & \mathbf{L}^\mathrm{T}\\
\mathbf{0} & \mathbf{0}
\end{bmatrix} \begin{bmatrix}
\mathbf{w}^\mathrm{a}\\
\dot{\mathbf{w}}^\mathrm{a}
\end{bmatrix}
\tag{3.15}\] \[
\begin{aligned}
\mathbf{w}^\mathrm{a} &= \mathbf{w}^\mathrm{a} + \mathbf{L}^\mathrm{T}\dot{\mathbf{w}}^\mathrm{a}\\
\dot{\mathbf{w}}^\mathrm{a} &= \mathbf{0}
\end{aligned}
\] である。 \(\dot{\mathbf{w}}^\mathrm{a} = \mathbf{0}\) もADMの一部であり、忘れるとバグの原因となりうる。
随伴モデルの作成
上述のように、TLMが行列\(\mathbf{L}\) で表せる場合は、ADMはその転置\(\mathbf{L}^\mathrm{T}\) を取ればよい。 明示的に行列で表さなくても、TLMのソースコードを行毎に逆順にたどりながらADMを作成することもできる。 ここでは、後で用いる、いくつかの簡単な操作に対する随伴を求める。
代入
代入\(A=B\) の接線型は \[
\begin{bmatrix}
\delta B \\ \delta A
\end{bmatrix}=
\begin{bmatrix}
1 & 0 \\ 1 & 0
\end{bmatrix}
\begin{bmatrix}
\delta B \\ \delta A
\end{bmatrix}
\tag{3.16}\] \[
\begin{bmatrix}
B^\mathrm{a} \\ A^\mathrm{a}
\end{bmatrix}=
\begin{bmatrix}
1 & 1 \\ 0 & 0
\end{bmatrix}
\begin{bmatrix}
B^\mathrm{a} \\ A^\mathrm{a}
\end{bmatrix}
\tag{3.17}\] \[
\begin{aligned}
B^\mathrm{a} &= A^\mathrm{a} + B^\mathrm{a}\\
A^\mathrm{a} &=0
\end{aligned}
\] である。
係数を掛けて和を取る操作
代入\(C = \alpha A + \beta B + \gamma D\) の接線型は \[
\begin{bmatrix}
\delta A\\ \delta B \\ \delta D \\ \delta C
\end{bmatrix} =
\begin{bmatrix}
1 & 0 & 0 & 0\\
0 & 1 & 0 & 0\\
0 & 0 & 1 & 0\\
\alpha & \beta & \gamma & 0
\end{bmatrix}
\begin{bmatrix}
\delta A\\ \delta B \\ \delta D \\ \delta C
\end{bmatrix}
\tag{3.18}\] \[
\begin{bmatrix}
A^\mathrm{a} \\ B^\mathrm{a} \\ D^\mathrm{a} \\ C^\mathrm{a}
\end{bmatrix} =
\begin{bmatrix}
1 & 0 & 0 & \alpha\\
0 & 1 & 0 & \beta\\
0 & 0 & 1 & \gamma\\
0 & 0 & 0 & 0
\end{bmatrix}
\begin{bmatrix}
A^\mathrm{a} \\ B^\mathrm{a} \\ D^\mathrm{a} \\ C^\mathrm{a}
\end{bmatrix}
\tag{3.19}\] \[
\begin{aligned}
A^\mathrm{a} &= A^\mathrm{a} + \alpha C^\mathrm{a} \\
B^\mathrm{a} &= B^\mathrm{a} + \beta C^\mathrm{a} \\
D^\mathrm{a} &= D^\mathrm{a} + \gamma C^\mathrm{a} \\
C^\mathrm{a} &=0
\end{aligned}
\] である。
ループ
TLMの最後の行から逆順にADMを作る。 ループは添字を逆に回す。 \(i = 1, 2, \cdots, m,\,1\le j \le m\) に対して
\[
\delta x_j = c_1\delta x_1 + c_2\delta x_2 + \cdots + c_ix_i + \cdots + c_m\delta x_m
\tag{3.20}\]
の随伴は
\[
\begin{aligned}
x_m^\mathrm{a} &= x_m^\mathrm{a} + c_m x_j^\mathrm{a}\\
& \vdots \\
x_i^\mathrm{a} &= x_i^\mathrm{a} + c_i x_j^\mathrm{a}\\
& \vdots \\
x_2^\mathrm{a} &= x_2^\mathrm{a} + c_2 x_j^\mathrm{a}\\
x_1^\mathrm{a} &= x_1^\mathrm{a} + c_1 x_j^\mathrm{a}\\
x_j^\mathrm{a} &= c_j x_j^\mathrm{a}
\end{aligned}
\tag{3.21}\]
TLMの行の右辺に現れる摂動変数\(\delta x_i\) に対応して、ADMの行では随伴変数\(x_i^\mathrm{a}\) が左辺に現れる。 \(x_i^\mathrm{a}\) には\(x_i^\mathrm{a}\) 自身に係数\(c_i\) とTLMの左辺に現れる摂動変数の随伴\(x_j^\mathrm{a}\) との積を加えたものになる。 左辺の変数と右辺の変数が場所が入れ替わっている。 \(x_j^\mathrm{a}\) は最後に現れる。 \(c_j=0\) の場合のように、TLMの右辺に\(x_j^\mathrm{a}\) がない場合でも、\(x_j^\mathrm{a}\) に0を割り当てないと、他の部分でエラーを引き起こしうる。
ADMにおける変分演算は、微分演算とは異なり、ある時刻における状態ベクトル全体に対する摂動なので、状態ベクトルの一部が変化しないからといって、それを省略したものはADMとしては正しくない。
Lorenz-63モデル
Lorenz (1963 ) のモデル(以下Lorenz-63)は熱対流を理想化したモデルで,パラメタ次第でカオスにふるまう。Lorenz-63は次の3変数の常微分方程式で表される。
\[
\begin{aligned}
\dot{X} &= -\sigma X + \sigma Y \\
\dot{Y} &= -XZ + rX -Y \\
\dot{Z} &= XY - \beta Z
\end{aligned}
\]
パラメタ\(\sigma\) , \(r\) , \(\beta\) はそれぞれPrandtl数,変形されたRayleigh数,アスペクト比を表す。 予報変数\(X, Y, Z\) はそれぞれ無次元化された対流の強さ,最大温度差,対流に伴う成層の変化を表す。 左辺の変数の上の\(\cdot\) は時間微分\(\mathrm{d}/\mathrm{d}t\) を表す記号である。
\(\mathbf{x}=(1,\,3,\,5)\) (青)及び\(\mathbf{x}=(1.1,\,3.3,\,5.5)\) (橙)から無次元時刻10まで積分した結果の3次元可視化結果を示す。回転や拡大縮小(右クリック)ができる。
Code
<- function (t, w, p, r, b){c (- p * w[1 ] + p * w[2 ],- w[3 ]) * w[1 ] - w[2 ],1 ] * w[2 ] - b * w[3 ] <- function (f, t, y, h, ...) {<- f (t, y, ...)<- f (t + 0.5 * h, y + 0.5 * h * k1, ...)<- f (t + 0.5 * h, y + 0.5 * h * k2, ...)<- f (t + h, y + h * k3, ...)+ h * (k1 + 2 * k2 + 2 * k3 + k4) / 6 <- function (f, x, nstep, dt, ...) {<- 0 for (i in 1 : nstep) {<- rk4 (f, t, x, dt, ...)<- t + dt
Code
library (rgl)options (rgl.useNULL = TRUE ):: setupKnitr ()palette ("Tableau 10" )<- 3 <- c (1 , 3 , 5 )<- c (1.1 , 3.3 , 5.5 )<- 10 <- 32 <- 8 / 3 <- 0.01 <- 1000 <- matrix (rep (0 , ns * nt), nrow= ns)1 ] <- x0<- matrix (rep (0 , ns * nt), nrow= ns)1 ] <- x0.pfor (j in 2 : nt) {<- (j - 1 ) * dt<- step.fom (l63, x.rk4[, j-1 ], 1 , dt, p, r, b)<- step.fom (l63, x.rk4p[, j-1 ], 1 , dt, p, r, b) plot3d (x.rk4[1 ,], x.rk4[2 ,], x.rk4[3 ,],axes= TRUE , xlab= "X" , ylab= "Y" , zlab= "Z" , type= 'l' ,lwd= 2 , col= 1 )plot3d (x.rk4p[1 ,], x.rk4p[2 ,], x.rk4p[3 ,], type= "l" ,lwd= 3 , col= 2 , add= TRUE )plot3d (x.rk4[1 ,1 ], x.rk4[2 ,1 ], x.rk4[3 ,1 ],type= "s" , size= 1 , col= 1 , add= TRUE )plot3d (x.rk4p[1 ,1 ], x.rk4p[2 ,1 ], x.rk4[3 ,1 ],type= "s" , size= 1 , col= 2 , add= TRUE )palette ("R4" )
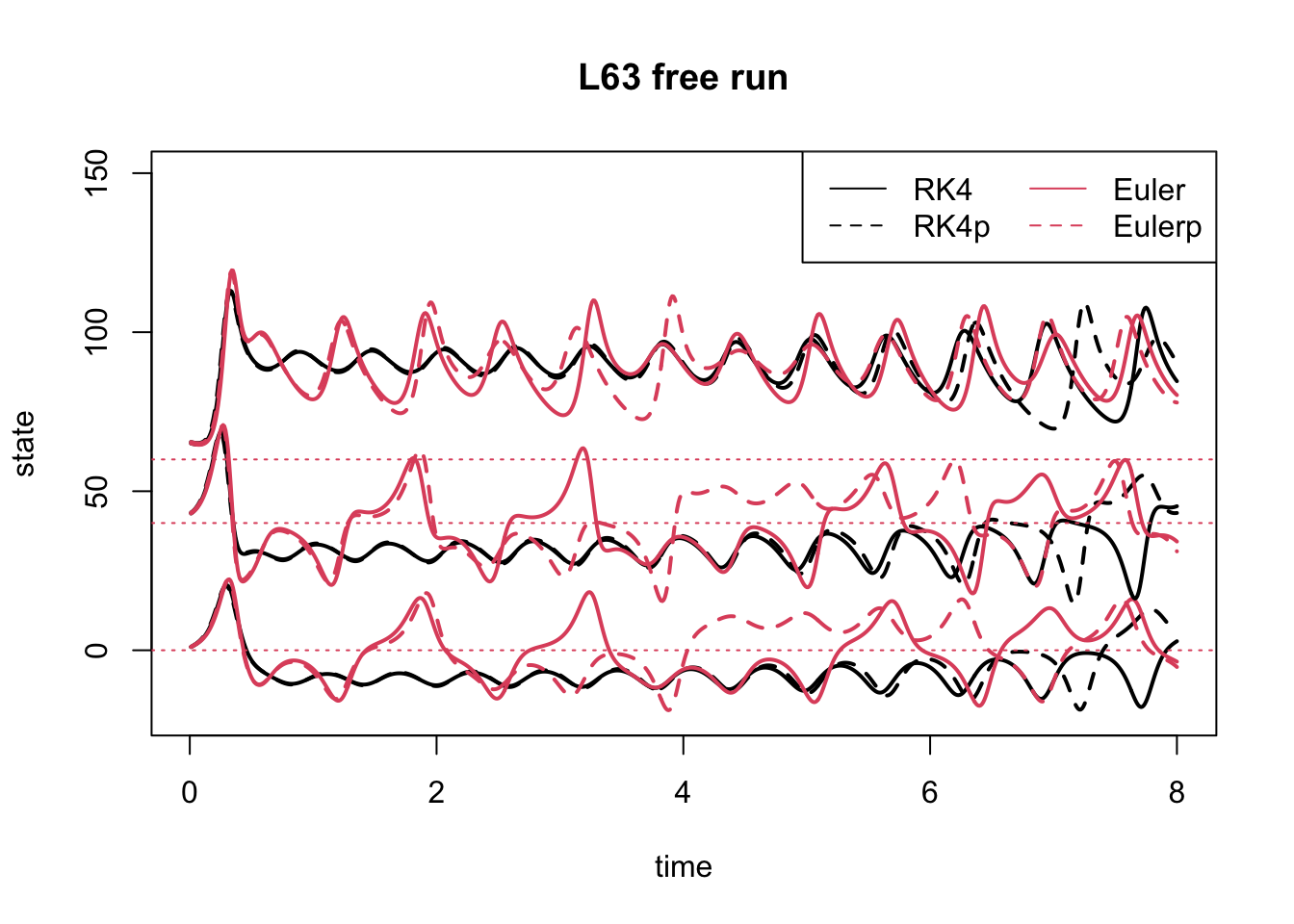
Lorenz-63の随伴モデルの作成方法は Huang and Yang (1996 ) に詳述されている。 この報告書やtenomoto/l63vda では時間積分にEuler法が用いられているが、4次のRunge-Kutta法(RK4)を用いると、より安定するので、パラメタ\(r\) を大きめにする。 青い実線及び破線は、時間積分にRK4を用いて\(\mathbf{x}=(1, 3, 5)\) 及び\((1.1, 3.3, 5.5)\) から積分したもので、橙色の実線及び破線はEuler法で\(\mathbf{x}=(1, 3, 5)\) 及び\((1.1, 3.3, 5.5)\) から積分したものである。 点線は報告書に掲載されている同じ設定とよく一致している。 RK4を用いると、解は安定していて初期値の差が現れるのが遅い。
Code
<- 3 <- c (1 , 3 , 5 )<- c (1.1 , 3.3 , 5.5 )<- 10 <- 32 <- 8 / 3 <- 0.01 <- 800 <- matrix (rep (0 , ns * nt), nrow= ns)1 ] <- x0<- matrix (rep (0 , ns * nt), nrow= ns)1 ] <- x0.p<- matrix (rep (0 , ns * nt), nrow= ns)1 ] <- x0<- matrix (rep (0 , ns * nt), nrow= ns)1 ] <- x0.pfor (j in 2 : nt) {<- (j - 1 ) * dt<- step.fom (l63, x.rk4[, j-1 ], 1 , dt, p, r, b)<- step.fom (l63, x.rk4p[, j-1 ], 1 , dt, p, r, b) <- x.eul[, j-1 ] + l63 (t, x.eul[, j-1 ], p, r, b) * dt<- x.eulp[, j-1 ] + l63 (t, x.eulp[, j-1 ], p, r, b) * dt<- paste ("L63 free run" )<- c (0 , 40 , 60 )<- (1 : nt) * dt<- x.rk4 + off<- x.rk4p + off<- x.eul + off<- x.eulp + offplot (1 , type = "n" , xlab= "time" , ylab= "state" , main= title,xlim= c (min (t), max (t)), ylim= c (- 20 , 150 ))for (i in 1 : ns) {lines (t, x.rk4[i,], lwd= 2 , lty= 1 , col= 1 )lines (t, x.rk4p[i,], lwd= 2 , lty= 2 , col= 1 )lines (t, x.eul[i,], lwd= 2 , lty= 1 , col= 2 )lines (t, x.eulp[i,], lwd= 2 , lty= 2 , col= 2 )abline (h= off[i], lty= 3 , col= 10 )legend ("topright" , lty= c (1 , 2 , 1 , 2 ), ncol= 2 ,legend= c ("RK4" , "RK4p" , "Euler" , "Eulerp" ),col= c (1 , 1 , 2 , 2 ))
Lorez-63の接線型モデルは次のように書ける。
\[
\begin{aligned}
\dot{\delta X} &= -\sigma \delta X + \sigma \delta Y \\
\dot{\delta Y} &= -\delta XZ -X\delta Z + r\delta X - \delta Y \\
\dot{\delta Z} &= \delta XY + X\delta Y - b\delta Z
\end{aligned}
\] \[
\begin{bmatrix}\delta\dot{X}\\\delta\dot{Y}\\\delta\dot{Z}\end{bmatrix}
= \begin{bmatrix}
-\sigma & \sigma & 0\\
r-Z & -1 & -X\\
Y & X & -\beta
\end{bmatrix}
\begin{bmatrix}\delta X\\\delta Y\\\delta Z \end{bmatrix}
\] 随伴モデルは行列を転置して次のように書ける。
\[
\begin{bmatrix}X^\mathrm{a}\\Y^\mathrm{a}\\Z^\mathrm{a}\end{bmatrix}
= \begin{bmatrix}X^\mathrm{a}\\Y^\mathrm{a}\\Z^\mathrm{a}\end{bmatrix} +\begin{bmatrix}
-\sigma & r-Z & Y\\
\sigma & -1 & X\\
0 & -X & -\beta
\end{bmatrix}
\begin{bmatrix}\dot{X}^\mathrm{a}\\\dot{Y}^\mathrm{a}\\\dot{Z}^\mathrm{a} \end{bmatrix}
\] ここで、\((X^\mathrm{a}, Y^\mathrm{a}, Z^\mathrm{a})^\mathrm{T}\) は随伴変数を表す。 つまり \[
\begin{aligned}
X^{\mathrm{a}} &= X^\mathrm{a} - \sigma\dot{\delta X}^\mathrm{a} + (r-Z)\dot{Y}^\mathrm{a} + Y\dot{Z}^\mathrm{a} \\
Y^{\mathrm{a}} &= Y^{\mathrm{a}} + \sigma\dot{X}^\mathrm{a} - \dot{ Y}^\mathrm{a} + X\dot{Z}^\mathrm{a} \\
Z^\mathrm{a} &= Z^\mathrm{a} - X\dot{Y}^\mathrm{a} - b\dot{Z}^\mathrm{a}
\end{aligned}
\] となる。
Lorenz-96モデル
Lorenz-96モデル(Lorenz and Emanuel 1998 ) \[
\frac{\mathrm{d}X_i}{\mathrm{d}t} = (X_{i+1} - X_{i-2})X_{i-1} - X_i + F
\tag{3.22}\] \(N(X)=(X_{i+1} - X_{i-2})X_{i-1}\) を線型化するには、掛け算の一方を順に摂動に置き換えるか、 \[
\begin{aligned}
\frac{\partial N}{\partial X_{i-2}} &= -X_{i-1} \\
\frac{\partial N}{\partial X_{i-1}} &= X_{i+1}-X_{i-2}\\
\frac{\partial N}{\partial X_{i+1}} &= X_{i-1}
\end{aligned}
\tag{3.23}\] \[
\frac{\mathrm{d}\delta X_i}{\mathrm{d}t} = -X_{i-1}\delta X_{i-2} + (X_{i+1} - X_{i-2})\delta X_{i-1} + X_{i-1}\delta X_{i+1} - \delta X_i
\tag{3.24}\]
(Equation 3.15 )に基づいて、随伴モデルを作る。 (Equation 3.24 )の右辺が表す\(\mathbf{L}\) の随伴\(\mathbf{L}^\mathrm{T}\) は、\(\delta X\) の添字が\(i\) となる行における係数を考えればよい。 右辺第1、2、3項の\(\delta X_{i-2},\,\delta X_{i-1},\,\delta X_{i+1}\) なので、それぞれ\(+2,\,+1,\,-1\) 加えれば\(i\) 行目になる。 さらに、左辺の変数(時間微分)と右辺の変数を入れ替え\(\mathbf{L}^\mathrm{T}\dot{\mathbf{w}}^\mathrm{a}\) が得られる。
L96の随伴モデルを書き下すと \[
X_i^\mathrm{a} = X_i^\mathrm{a} - X_{i+1}\frac{\mathrm{d}X_{i+2}^\mathrm{a}}{\mathrm{d}t} + (X_{i+2} -X_{i-1})\frac{\mathrm{d}X_{i+1}^\mathrm{a}}{\mathrm{d}t}
+X_{i-2}\frac{\mathrm{d}X_{i-1}^\mathrm{a}}{\mathrm{d}t} - \frac{\mathrm{d}X_{i}^\mathrm{a}}{\mathrm{d}t}\\
\tag{3.25}\] \[
\frac{\mathrm{d}X_{i}^\mathrm{a}}{\mathrm{d}t} = 0
\] となる。
拡散方程式
1次元の拡散方程式
\[
\frac{\partial u}{\partial t} = \sigma\frac{\partial^2 u}{\partial x^2}
\] を差分で離散化して、接線型モデルと随伴モデルを導出する(Kalnay 2003 ) 。
時刻(\(t\) 、添字\(k\) )方向に前方、空間(\(x\) 、添字\(i\) )方向に中央差分すると
\[
u_i^{k+1} = u_i^k + \alpha(u_{i+1}^k - 2u_i^k + u_{i-1}^k)
\tag{3.26}\]
ここで\(\alpha = \sigma\Delta t/\Delta x^2\) である。
拡散方程式は線型なので、\(u = u_\mathrm{b} + \delta u\) のように基本場と摂動に分けると、接線型モデルはEquation 3.26 の変数を摂動に置き換えて次のように書ける。
\[
\begin{aligned}
\delta u_i^{k+1} &= \delta u_i^k + \alpha(\delta u_{i+1}^k - 2\delta u_i^k + \delta u_{i-1}^k)\\
&= \begin{pmatrix}\alpha & 1 - 2\alpha & \alpha\end{pmatrix}
\begin{pmatrix}\delta u_{i-1}^k \\ \delta u_i^k \\ \delta u_{i+1}^k\end{pmatrix}
\end{aligned}
\tag{3.27}\]
上式に現れる変数を列ベクトルで表し、行列ベクトル積で表すと次のようになる。
\[
\begin{pmatrix}\delta u_{i-1}^k \\ \delta u_i^k \\ \delta u_{i+1}^k \\\delta u_i^{k+1}\end{pmatrix} =
\begin{pmatrix}
1 & 0 & 0 & 0\\
0 & 1 & 0 & 0\\
0 & 0 & 1 & 0\\
\alpha & 1 - 2\alpha & \alpha & 0
\end{pmatrix}
\begin{pmatrix}\delta u_{i-1}^k \\ \delta u_i^k \\ \delta u_{i+1}^k \\\delta u_i^{k+1}\end{pmatrix}
\tag{3.28}\]
摂動をベクトル\(\delta \mathbf{u}^k\) で表すと
\[
\begin{pmatrix}\delta\mathbf{u}^k \\ \delta\mathbf{u}^{k+1}\end{pmatrix} =
\begin{pmatrix}\mathbf{I} & 0 \\ \mathbf{L} & 0\end{pmatrix}
\begin{pmatrix}\delta\mathbf{u}^k \\ \delta\mathbf{u}^{k+1}\end{pmatrix}
\]
と表すことができる。 ここで\(\mathbf{I}\) は単位行列で\(\mathbf{L}\) は、境界条件に合わせた(準)三重対角行列になる。 例えば周期境界条件の場合 \[
\mathbf{L} = \begin{pmatrix}
1 - 2\alpha & \alpha & 0 & \dots & 0 & 0 & \alpha\\
\alpha & 1- 2\alpha & \alpha & 0 & \dots & 0 &0\\
0 & \alpha & 1-2\alpha & \alpha & 0 & \dots & 0\\
\vdots & \ddots & \ddots & \ddots & \ddots & \ddots & \vdots\\
0 & \dots & 0 & \alpha &1-2\alpha & \alpha &0 \\
0 & \dots & 0 & 0 & \alpha & 1-2\alpha &\alpha \\
\alpha & 0 & 0 & \dots & 0 & \alpha & 1-2\alpha
\end{pmatrix}
\]
Equation 3.28 を転置すると、随伴モデル \[
\begin{pmatrix}\delta^* u_{i-1}^k \\ \delta^* u_i^k \\ \delta^* u_{i+1}^k \\ \delta^* u_i^{k+1}\end{pmatrix} =
\begin{pmatrix}
1 & 0 & 0 & \alpha\\
0 & 1 & 0 & 1-2\alpha\\
0 & 0 & 1 & \alpha\\
0 & 0 & 0 & 0
\end{pmatrix}
\begin{pmatrix}\delta^* u_{i-1}^k \\ \delta^* u_i^k \\ \delta^* u_{i+1}^k \\ \delta^* u_i^{k+1}\end{pmatrix}
\tag{3.29}\]
\[
\begin{pmatrix}\delta^*\mathbf{u}^k \\ \delta^*\mathbf{u}^{k+1}\end{pmatrix} =
\begin{pmatrix}\mathbf{I} & \mathbf{L} \\ 0 & 0\end{pmatrix}
\begin{pmatrix}\delta\mathbf{u}^k \\ \delta\mathbf{u}^{k+1}\end{pmatrix}
\]
となる。 この例では\(\mathbf{L}^* = \mathbf{L}\) である。
Equation 3.29 を書き下すと
\[
\begin{aligned}
\delta^*u_{i-1}^k &= \delta^*u_{i-1}^k + \alpha \delta^*u_i^{k+1} \\
\delta^*u_i^k &= \delta^*u_i^k + (1 - 2\alpha)\delta^*u_i^{k+1}\\
\delta^*u_{i+1}^k &= \delta^*u_{i+1}^k + \alpha \delta^*u_i^{k+1}\\
\delta^*u_i^{k+1} &= 0
\end{aligned}
\]
となる。 \(k+1\) における摂動の更新(0にする)は最後に行う。
\(u\) のフーリエ変換と逆変換を
\[
\begin{aligned}
u_m &= \frac{1}{\sqrt{2\pi}}\int_0^{2\pi}u(x)\exp(-imx)\mathrm{d}x\\
u(x) &= \frac{1}{\sqrt{2\pi}}\sum_{-\infty}^\infty u_m\exp(imx)
\end{aligned}
\] とすると、2階微分は次のように書ける。
\[
\frac{\partial^2 u}{\partial x^2} = -\frac{m^2}{\sqrt{2\pi}}\sum_{-\infty}^\infty u_m\exp(imx)
\] 拡散方程式は波数空間で次のように表される。
\[
\mathbf{u}^{k+1} = \alpha \mathbf{u}^k
\] ここで、\(\alpha = 1 - \sigma m^2\Delta t\) である。
接線型モデルは \[
\delta\mathbf{u}^{k+1} = \alpha\delta\mathbf{u}^k
\]
\[
\begin{pmatrix}
\delta\mathbf{u}^k \\ \delta\mathbf{u}^{k+1}
\end{pmatrix} =
\begin{pmatrix}
\mathbf{I} & 0 \\
\mathbf{L} & 0
\end{pmatrix}
\begin{pmatrix}
\delta\mathbf{u}^k \\ \delta\mathbf{u}^{k+1}
\end{pmatrix}
\]
となる。 ここで\(\mathbf{L} = \alpha\mathbf{I}\) である。
随伴モデルは \[
\begin{pmatrix}
\delta^*\mathbf{u}^k \\ \delta^*\mathbf{u}^{k+1}
\end{pmatrix} =
\begin{pmatrix}
\mathbf{I} & \mathbf{L} \\
0 & 0
\end{pmatrix}
\begin{pmatrix}
\delta^*\mathbf{u}^k \\ \delta^*\mathbf{u}^{k+1}
\end{pmatrix}
\] すなわち
\[
\begin{aligned}
\delta^*\mathbf{u}^k &= (\mathbf{I} + \mathbf{L})\delta^*\mathbf{u}^{k+1} = (1 + \alpha)\mathbf{I}\delta^*\mathbf{u}^{k+1}\\
\delta^*\mathbf{u}^{k+1} &= 0
\end{aligned}
\] となる。
4次のRunge-Kutta法
\[
\dot{y} = f(t, y)
\tag{3.30}\]
を4次のRunge-Kutta(RK4)法で積分する。 \[
\begin{aligned}
y_{n+1} &= y_{n} + \frac{h}{6}(k_1 + 2k_2 + 2k_3 + k_4) \\
k_1 &= f(t_n,\,y_n) \\
k_2 &= f\left(t_n + \frac{h}{2},\,y_n + \frac{h}{2}k_1\right) \\
k_3 &= f\left(t_n + \frac{h}{2},\,y_n + \frac{h}{2}k_2\right) \\
k_4 &= f(t_n + h,\,y_n + hk_3) \\
\end{aligned}
\tag{3.31}\]
\(k\) の係数はButcherの表(Butcher and Wanner 1996 ) \[
\begin{array}{c|c}
\mathbf{c} &\mathbf{A}\\
\hline
& \mathbf{b}^\mathrm{T}
\end{array}
\tag{3.32}\] \(s\) 次の陽的Runge-Kutta法は \[
\begin{aligned}
y_{n+1} &= y_n + h\sum_{i=1}^sb_ik_i\\
k_i &=f(t_n+c_ih, y_n+ h\sum_{j=1}^{i-1}a_{ij}k_j)
\end{aligned}
\] と書ける。 \(\mathbf{A}\) は対角成分が0である下三角行列になる。
RK4に対するButcherの表は次のようになる。 \[
\begin{array}{c|ccccc}
0 \\
1/2 & 1/2\\
1/2 & 0 & 1/2\\
1 & 0 & 0 & 1\\
\hline
& 1/6 & 1/3 & 1/3 & 1/6
\end{array}
\tag{3.33}\]
RK4の接線型は次の通りである。 \[
\begin{aligned}
\delta y_{n+1} &= \delta y_{n} + \frac{h}{6}(\delta k_1 + 2\delta k_2 + 2\delta k_3 + \delta k_4) \\
\delta k_1 &= \delta f(t_n,\,y_n,\,\delta y_n) \\
\delta k_2 &= \delta f\left(t_n + \frac{h}{2},\,y_n + \frac{h}{2}k_1,\,\delta y_n + \frac{h}{2}\delta k_1\right) \\
\delta k_3 &= \delta f\left(t_n + \frac{h}{2},\,y_n + \frac{h}{2}k_2,\,\delta y_n + \frac{h}{2}\delta k_2\right) \\
\delta k_4 &= \delta f(t_n + h,\,y_n + hk_3,\,\delta y_n + h\delta k_3)
\end{aligned}
\tag{3.34}\] \(\delta f=\partial f/\partial y\) は接線型モデルである。 \(\delta k_1,\,\delta k_2,\,\delta k_3,\,\delta k_4\) は出力しないので、\(\delta y\) を更新した後 \[
\delta\mathbf{k} \equiv [\delta k_1,\,\delta k_2,\,\delta k_3,\,\delta k_4]^\mathrm{T}=0
\] と置くと、行列形式では \[
\begin{bmatrix}
\delta\mathbf{k} \\ \delta y
\end{bmatrix}
=
\begin{bmatrix}
0 & 0 \\
h\mathbf{b}^\mathrm{T} & 1
\end{bmatrix}
\begin{bmatrix}
\delta\mathbf{k} \\ \delta y
\end{bmatrix}
\tag{3.35}\]
随伴は \[
\begin{bmatrix}
\mathbf{k}^\mathrm{a} \\ y^\mathrm{a}
\end{bmatrix}
=
\begin{bmatrix}
0 & h\mathbf{b}\\
0 & 1
\end{bmatrix}
\begin{bmatrix}
\mathbf{k}^\mathrm{a} \\ y^\mathrm{a}
\end{bmatrix}
\tag{3.36}\] \(k_1^\mathrm{a} = hy^\mathrm{a}/6,\,k_2^\mathrm{a} = hy^\mathrm{a}/3,\,k_3^\mathrm{a} = hy^\mathrm{a}/3,\,k_4^\mathrm{a} = hy^\mathrm{a}/6\) と初期化される。
\(L\) を線型演算子、\(\alpha\) をスカラ係数として \(C=L(A+\alpha B)\) は \[
\begin{bmatrix}
A \\ B \\ C
\end{bmatrix} =
\begin{bmatrix}
1 & 0 & 0\\
0 & 1 & 0\\
L & \alpha L & 0
\end{bmatrix}
\begin{bmatrix}
A \\ B \\ C
\end{bmatrix}
\] と書けるので、その随伴は \[
\begin{bmatrix}
A^\mathrm{a} \\ B^\mathrm{a} \\ C^\mathrm{a}
\end{bmatrix} =
\begin{bmatrix}
1 & 0 & L^\mathrm{T}\\
0 & 1 & \alpha L^\mathrm{T}\\
0 & 0 & 0
\end{bmatrix}
\begin{bmatrix}
A^\mathrm{a} \\ B^\mathrm{a} \\ C^\mathrm{a}
\end{bmatrix}
\] つまり\(A^\mathrm{a} = A^\mathrm{a} + LC^\mathrm{a},\,B^\mathrm{a} = B^\mathrm{a} + \alpha LC^\mathrm{a},\,C^\mathrm{a}=0\) である。 これを用いるとRK4の随伴は次の順序で計算される。 \[
\begin{aligned}
f_4^\mathrm{a} &\equiv f^\mathrm{a}(t_n + h,\,y_n + hk_3,\,k_4^\mathrm{a})\\
y^\mathrm{a} &= y^\mathrm{a} + f_4^\mathrm{a}\\
k_3^\mathrm{a} &= k_3^\mathrm{a} + hf_4^\mathrm{a} \\
k_4^\mathrm{a} &= 0 \\
f_3^\mathrm{a} &\equiv f^\mathrm{a}\left(t_n + \frac{h}{2},\,y_n + \frac{h}{2}k_2, \,k_3^\mathrm{a}\right)\\
y^\mathrm{a} &= y^\mathrm{a} + f_3^\mathrm{a}\\
k_2^\mathrm{a} &= k_2^\mathrm{a} + \frac{h}{2}f_3^\mathrm{a} \\
k_3^\mathrm{a} &= 0 \\
f_2^\mathrm{a} &\equiv \delta f^\mathrm{a}\left(t_n + \frac{h}{2},\,y_n + \frac{h}{2}k_1,\, k_2^\mathrm{a}\right)\\
y^\mathrm{a} &= y^\mathrm{a} + f_2^\mathrm{a}\\
k_1^\mathrm{a} &= k_1^\mathrm{a} + \frac{h}{2}f_2^\mathrm{a} \\
k_2^\mathrm{a} &= 0 \\
y^\mathrm{a} &= y^\mathrm{a} + f^\mathrm{a}(t_n,\,y_n,\,k_1^\mathrm{a})\\
k_1^\mathrm{a} &= 0
\end{aligned}
\]
接線型及び随伴の動作確認
接線型は \[N(\mathbf{w}+\Delta\mathbf{w})-N(\mathbf{w})\approx \mathbf{L}(\mathbf{w})\Delta\mathbf{w} \tag{3.37}\] \(N\) は非線型モデル、\(\mathbf{L}\) は接線型モデル 、\(\mathbf{w}\) は状態、\(\Delta\mathbf{w}\) は摂動を表す。精度は\(\mathbf{w}\) における\(N\) の非線型の強さや摂動\(\Delta\mathbf{w}\) の振幅に依存する。
随伴は \[(\mathbf{L}(\mathbf{w})\Delta\mathbf{w})^\mathrm{T}(\mathbf{L}(\mathbf{w})\Delta\mathbf{w})=\Delta\mathbf{w}^\mathrm{T}[\mathbf{L}(\mathbf{w})^\mathrm{T}(\mathbf{L}(\mathbf{w})\Delta\mathbf{w})] \tag{3.38}\]
Butcher, J. C., and G. Wanner, 1996: Runge-
Kutta methods: Some historical notes.
Appl. Numer. Math. ,
22 , 113–151,
https://doi.org/10.1016/S0168-9274(96)00048-7 .
Huang, X.-Y., and X. Yang, 1996: Variational data assimilation with the Lorenz model . HIRLAM,.
Kalnay, E., 2003: Atmospheric modeling, data assimilation and predictability . Cambridge University Press,.
Lorenc, A. C., 1986: Analysis methods for numerical weather prediction. Quart. J. Roy. Meteor. Soc. , 112 , 1177–1194.
Lorenz, E. N., 1963: Deterministic nonperiodic flow.
J. Atmos. Sci. ,
20 , 130–141,
https://doi.org/10.1175/1520-0469(1963)020<0130:DNF>2.0.CO;2 .
——, and K. A. Emanuel, 1998: Optimal sites for supplementary weather observations: Simulation with a small model.
J. Atmos. Sci. ,
55 , 399–414,
https://doi.org/10.1175/1520-0469(1998)055<0399:OSFSWO>2.0.CO;2 .
Sasaki, Y., 1958: An objective analysis based on the variational method.
J. Meteor. Soc. Japan ,
36 , 77–88,
https://doi.org/10.2151/jmsj1923.36.3_77 .
Talagrand, O., 1991: Adjoint models. Reading, UK, European Centre for Midium-Range Weather Forecasts, 73–91
https://www.ecmwf.int/sites/default/files/elibrary/1991/12548-adjoint-models.pdf .
——, and P. Courtier, 1987: Variational assimilation of meteorological observations with the adjoint vorticity equation.
I :
Theory .
Quart. J. Roy. Meteor. Soc. ,
113 , 1311–1328,
https://doi.org/10.1002/qj.49711347812 .
Tsuyuki, T., and T. Miyoshi, 2007: Recent progress of data assimilation methods in
Meteorology .
J. Meteor. Soc. Japan. ,
85B , 331–361,
https://doi.org/10.2151/jmsj.85B.331 .